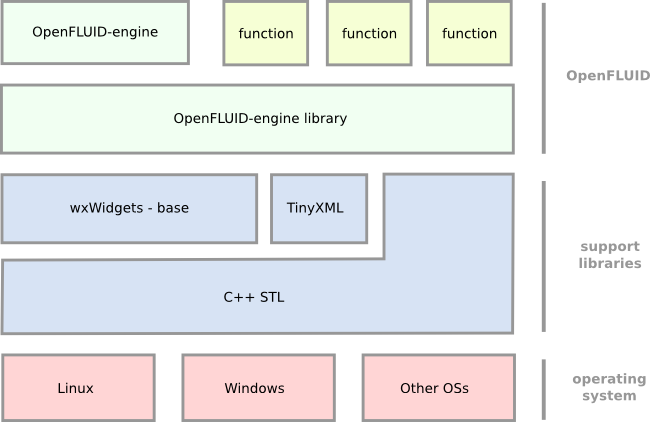
The OpenFLUID-engine library features are gathered together into the openfluid namespace, which is splitted into three parts:
-
openfluid::core, defined in openfluid-core.h, gathers all the classes for the shared data between the kernel and the functions, and between the functions themselves
-
openfluid::base, defined in openfluid-base.h, gathers all the classes for the dynamic linking between the kernel and the functions, and in particular the openfluid::base::PluggableFunction class
-
openfluid::tools, defined in openfluid-tools.h, gathers tools available to process data, to build structures, to read files, ...
This library mainly rely on three external libraries:
The Openfluid-engine provides a plugin interface for creating functions that can be handled by the kernel.
This involves the following classes and structures:
In order to store and manage all the data handled to represent the spatial domain and the simulation information, the OpenFLUID-engine library defines a data structure for spatio-temporal data management.
This involves the following classes and structures:
The simulation variables can be scalar data (a double precision floating value) or vector data (vector of double precision floating values). A date is associated to each value of simulation variables. This involves the following classes and structures:
Simulation functions can handle discrete events, associated to homogeneous units. This involves the following classes and structures:
This involves the following classes and structures:
FortranCPP.h
 Creative Commons By-NC-ND license
Creative Commons By-NC-ND license